mirror of
https://github.com/gabrielkheisa/control-system.git
synced 2026-06-01 07:13:42 +00:00
Add PI tests graph
This commit is contained in:
@@ -5,7 +5,7 @@ This dir is belong to Control System class contains with Integral Effect on Cont
|
|||||||
This program ran in Matlab
|
This program ran in Matlab
|
||||||
|
|
||||||
## Variables
|
## Variables
|
||||||
`s = tf('s');` defines s as 'frequency domain' for transfer function and will be used further.
|
`s = tf('s');` defines `s` as 'frequency domain' for transfer function and will be used further.
|
||||||
```
|
```
|
||||||
J = 0.01;
|
J = 0.01;
|
||||||
b = 0.1;
|
b = 0.1;
|
||||||
@@ -63,7 +63,14 @@ For Kp = 1
|
|||||||
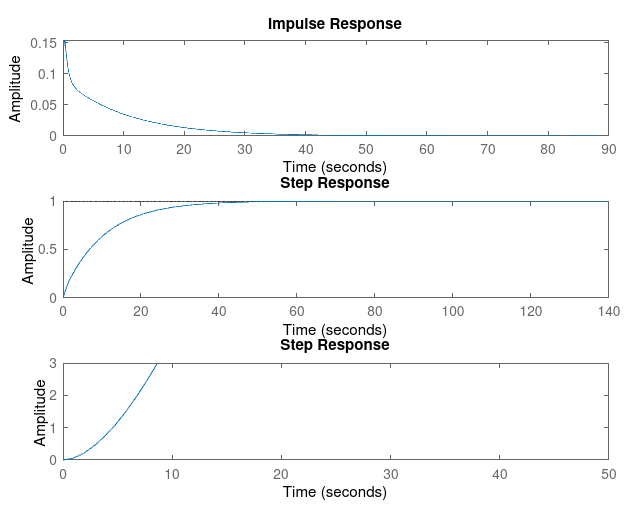
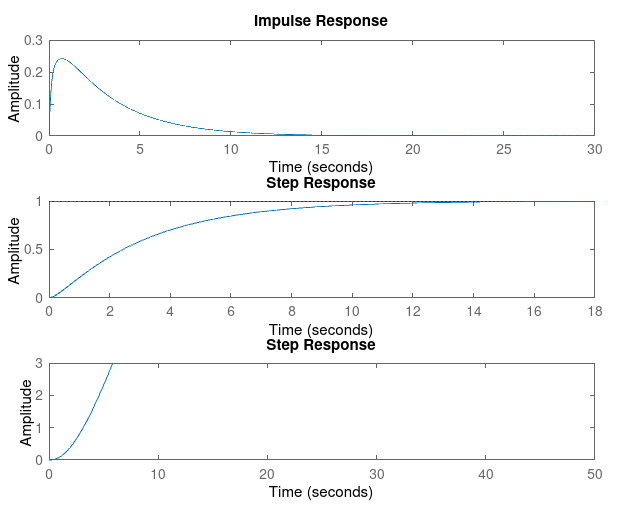
| Overshoot | 0 | 0 | 0 | 0.3523 | 0 |
|
| Overshoot | 0 | 0 | 0 | 0.3523 | 0 |
|
||||||
| SSE | 1.7396e-06 | 0.0034 | 0.0033 | 0.0034 | 6.6536e-05 |
|
| SSE | 1.7396e-06 | 0.0034 | 0.0033 | 0.0034 | 6.6536e-05 |
|
||||||
|
|
||||||
Notes: In theory, SSE should decrease following the increased Ki, but i suspect Matlab just can't compute too much floating point. Hence, i add two additional test with larger constant to show the effects.
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
Notes: In theory, SSE should decrease following the increased Ki, but i suspect Matlab just can't compute too much floating point. Hence, i add two additional test below with larger constant to show the effects.
|
||||||
|
|
||||||
## Additional Testing
|
## Additional Testing
|
||||||
For Kp = 50
|
For Kp = 50
|
||||||
@@ -74,6 +81,10 @@ For Kp = 50
|
|||||||
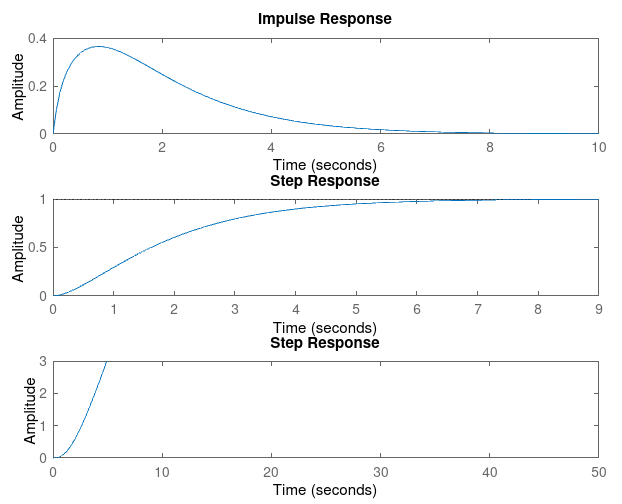
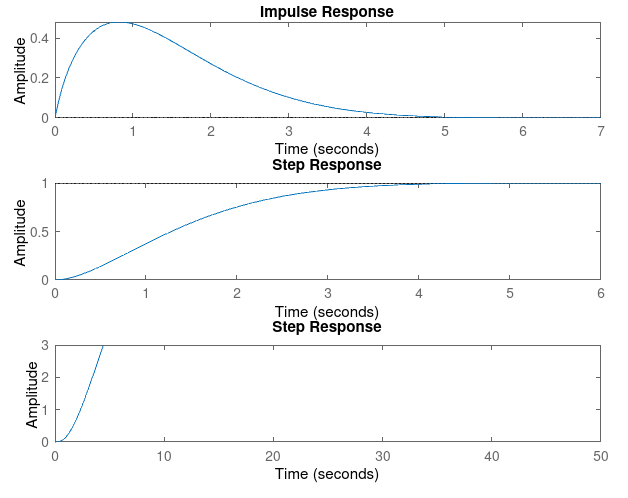
| Overshoot | 19.6150 | 6.1627 |
|
| Overshoot | 19.6150 | 6.1627 |
|
||||||
| SSE | 0.1127 | 0.0082 |
|
| SSE | 0.1127 | 0.0082 |
|
||||||
|
|
||||||
|

|
||||||
|

|
||||||
|
|
||||||
|
|
||||||
## Conclusion
|
## Conclusion
|
||||||
Based on previous tests, we conclude that by adding Integral constant :
|
Based on previous tests, we conclude that by adding Integral constant :
|
||||||
* Risie time is **increased**
|
* Risie time is **increased**
|
||||||
@@ -85,4 +96,4 @@ Based on previous tests, we conclude that by adding Integral constant :
|
|||||||
Contact nanda.r.d@mail.ugm.ac.id for more information
|
Contact nanda.r.d@mail.ugm.ac.id for more information
|
||||||
### Links
|
### Links
|
||||||
You can access the source code here
|
You can access the source code here
|
||||||
[github.com/nandard/routh_table.git](https://github.com/nandard/routh_table.git)
|
[github.com/nandard/routh_table.git](https://github.com/nandard/routh_table.git)
|
||||||
|
|||||||
Reference in New Issue
Block a user