mirror of
https://github.com/gabrielkheisa/control-system.git
synced 2026-06-01 07:13:42 +00:00
Add assignment five
This commit is contained in:
@@ -0,0 +1,93 @@
|
||||
# Derivative Effect on Control System
|
||||
This dir is belong to Control System class contains with Derivative Effect on Control System. This code 100% original made by my hand :), please leave some notes if you're going to use it. Thanks!
|
||||
|
||||
## Software
|
||||
This program ran in Matlab
|
||||
|
||||
## Variables
|
||||
`s = tf('s');` defines `s` as 'frequency domain' for transfer function and will be used further.
|
||||
```
|
||||
J = 0.01;
|
||||
b = 0.1;
|
||||
K = 0.01;
|
||||
R = 1;
|
||||
L = 0.5;
|
||||
```
|
||||
Those variable comes from BLDC control system.
|
||||
```
|
||||
Kp = 1;
|
||||
Kd = 1;
|
||||
% Kd = 3;
|
||||
% Kd = 5;
|
||||
% Kd = 7;
|
||||
% Kd = 9;
|
||||
```
|
||||
Variable above is the constant from PD control, we're trying to varies the constant to analyze derivative effect on control system
|
||||
|
||||
## Process
|
||||
The BLDC motor control system should be defined as transfer function by initialize its numerator-denumerator and *tf()* function.
|
||||
```
|
||||
num_motor = [K];
|
||||
den_motor = [J*L J*R+b*L R*b+K*K];
|
||||
|
||||
motor = tf(num_motor,den_motor)
|
||||
```
|
||||
Besides the plant function, the PD-control system defined by `C = tf([Kd Kp 0],[0 1 0])`. The vector is set according to PD formula which `PD = Kp + Kd * s`. After that, both of system are multiplied each others without feedback by `complete = feedback(motor*C,1);`
|
||||
|
||||
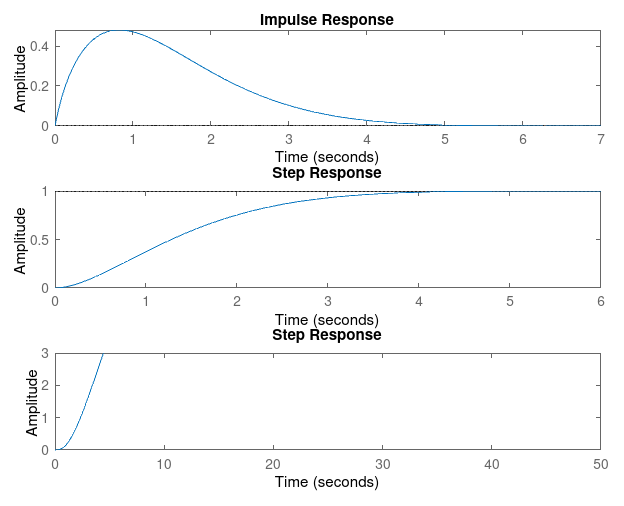
That system will be test with step, ramp, and impulse input by call below lines
|
||||
```
|
||||
subplot(311), impulse(complete); % Impulse reponse
|
||||
subplot(312), step(complete); % Step Response
|
||||
subplot(313), step(complete / s); % Ramp response
|
||||
stepinfo(complete)
|
||||
```
|
||||
|
||||
Since Matlab doesn't provide any steady-state error calculation, we process it by call below lines
|
||||
```
|
||||
[y,t] = step(complete); % Calculate Steady-State error
|
||||
sse = abs(1 - y(end))
|
||||
```
|
||||
Last line works to limit the graph
|
||||
```
|
||||
xlim([0 50])
|
||||
ylim([0 3])
|
||||
```
|
||||
|
||||
|
||||
## Testing
|
||||
For Kp = 1
|
||||
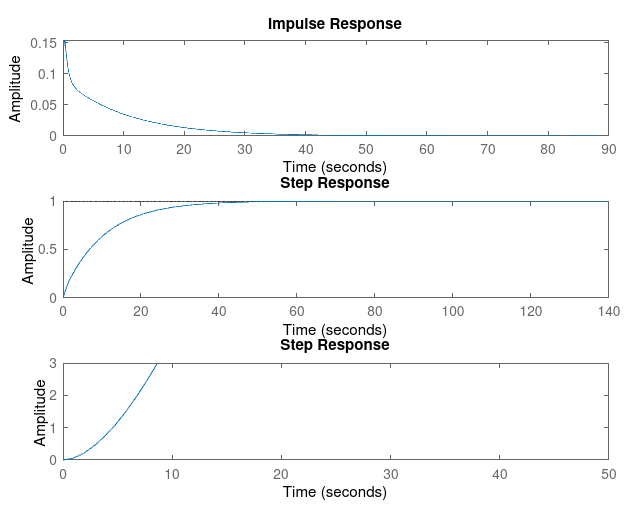
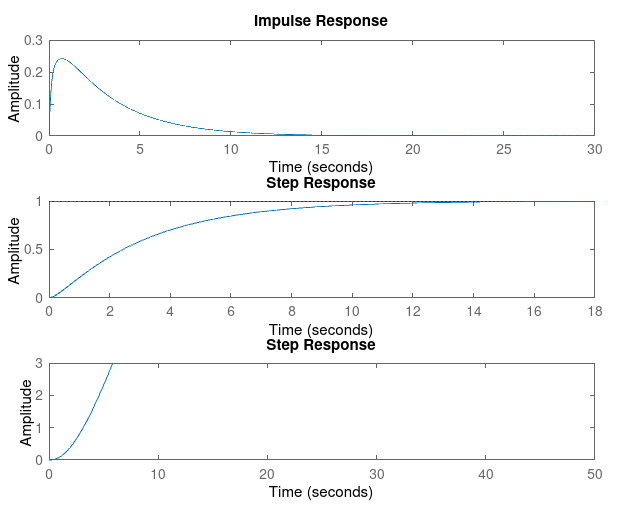
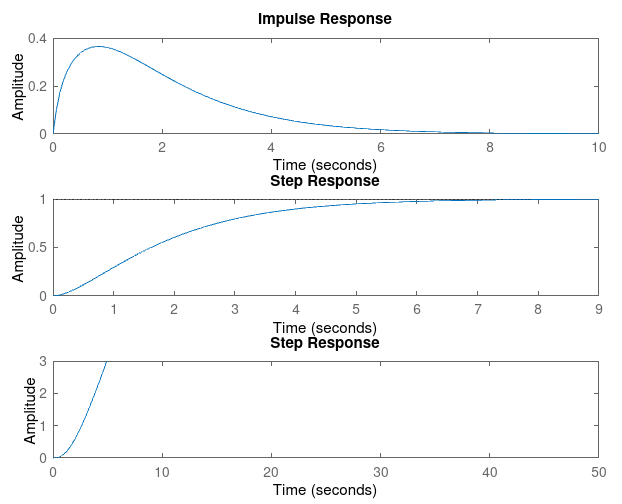
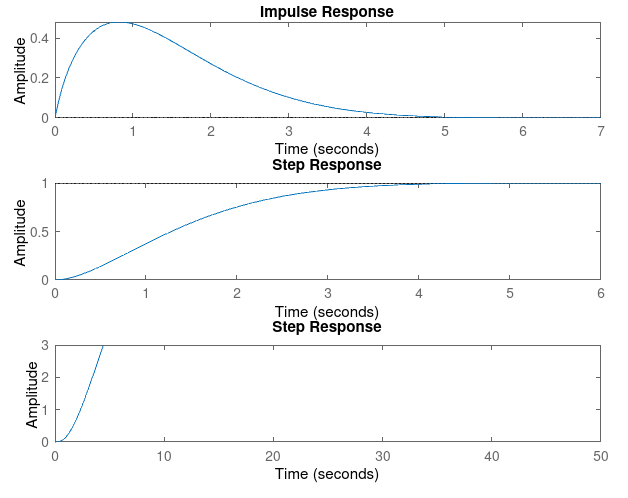
| Param | Kd = 1 | Kd = 3 | Kd = 5 | Kd = 7 | Kd = 9 |
|
||||
|--- |--- |--- |--- |--- |--- |
|
||||
| Rise Time | 0.0540 | 0.0140 | 0.0081 | 0.0057 | 0.0044 |
|
||||
| Settling Time | 2.1356 | 3.2085 | 3.9313 | 4.6494 | 5.3646 |
|
||||
| Overshoot | 50.9930 | 232.5791 | 359.4791 | 452.0385 | 522.2002 |
|
||||
| SSE | 0.9088 | 0.9077 | 0.9075 | 0.9075 | 0.9069 |
|
||||
|
||||
### Kp = 1, Kd = 1
|
||||
|
||||
|
||||
### Kp = 1, Kd = 3
|
||||
|
||||
|
||||
### Kp = 1, Kd = 5
|
||||
|
||||
|
||||
### Kp = 1, Kd = 7
|
||||
|
||||
|
||||
### Kp = 1, Kd = 9
|
||||
|
||||
|
||||
|
||||
## Conclusion
|
||||
Based on previous tests, we conclude that by adding Integral constant :
|
||||
* Risie time is **increased**
|
||||
* Settling time is **increased**
|
||||
* Overshoot is **decreased**
|
||||
* SSE is **decreased**
|
||||
|
||||
### Notes
|
||||
Contact nanda.r.d@mail.ugm.ac.id for more information
|
||||
### Links
|
||||
You can access the source code here
|
||||
[github.com/nandard/control-system.git](https://github.com/nandard/control-system.git)
|
||||
@@ -0,0 +1,33 @@
|
||||
s = tf('s');
|
||||
J = 0.01;
|
||||
b = 0.1;
|
||||
K = 0.01;
|
||||
R = 1;
|
||||
L = 0.5;
|
||||
|
||||
Kp = 1;
|
||||
%Kd = 1;
|
||||
%Kd = 3;
|
||||
%Kd = 5;
|
||||
%Kd = 7;
|
||||
Kd = 9;
|
||||
|
||||
num_motor = [K];
|
||||
den_motor = [J*L J*R+b*L R*b+K*K];
|
||||
motor = tf(num_motor,den_motor)
|
||||
|
||||
C = tf([Kd Kp 0],[0 1 0])
|
||||
|
||||
complete = feedback(motor*C,1);
|
||||
|
||||
subplot(311), impulse(complete); % Impulse reponse
|
||||
subplot(312), step(complete) % Step Response
|
||||
subplot(313), step(complete / s); % Ramp response
|
||||
title("Ramp Response");
|
||||
stepinfo(complete)
|
||||
|
||||
[y,t] = step(complete); % Calculate Steady-State error
|
||||
sse = abs(1 - y(end))
|
||||
|
||||
xlim([0 3])
|
||||
ylim([0 3])
|
||||
Reference in New Issue
Block a user